![AIで、しごとするなら 活用・開発・導入を加速させる[AI専門メディア]](https://blog.ailia.ai/wp-content/themes/ailia-media-2024/assets/images/main_copy.png)



本連載は、コンピューター・サイエンス&テクノロジ専門誌『Interface』編集部と、株式会社アクセルの共同企画です。記事を担当するのは、現役のきゅうり農家を営みながらプログラミングや開発を行う、小池 誠さん。連載では製作やアプリ開発を通してエッジAIの技術解説を行います。
AIの推論モデル実行には、アクセルのエッジAI用推論エンジン「アイリアSDK(ailia SDK)」を使います。
2025年7月には著者による「農業×エッジAIセミナ」を開催する予定です。
※本企画は『Interface』2025年6月号に掲載された記事を再編集したものです。
今回は害虫の捕ばく状況をネットワークを通じてモニタリングできる,害虫モニタリング装置の仕様や課題の解決方法、使用するハードウェアについて説明します。
解決したい課題
●重要な害虫防除
農業において害虫防除は,作物の収穫量と品質を維持し安定した農家経営を行うために不可欠です。害虫の発生を放置すると、病害の媒介や果実の食害などを引き起こし、大きな経済的損失につながります。
例えば,キュウリに付く害虫として代表的なものに、アザミウマ、ハモグリバエ、コナジラミ、アブラムシなどがあります。これら農業害虫は繁殖力が非常に強く、防除のタイミングが遅れてしまうと瞬く間に大量発生してしまいます。そのため、防虫ネットなどの予防のための対策はもちろんのこと、発生状況をモニタリングすることも重要な対策となります。害虫の発生を早期に発見し、作物への被害を最小限に抑えることが重要です。
●害虫モニタリングの課題
害虫駆除とモニタリングの最も普及している方法として、粘着シートを用いる方法があります。実際の使用例を写真1に示します。粘着性のあるシートを温室ハウス内に設置し、飛んでいる害虫を捕ばくする方法です。比較的低コストで複数設置が可能な点やシートを吊るすだけという使いやすさなどで、広く普及している方法です。しかし、簡単な仕組みである反面、次のような不便な点もあります。
- 毎日目視で確認しないといけない
- 日々の変化はトレースできない
- 吸着した虫の量が増えてくるとどれだけ増加したのかが分かりにくい

害虫駆除という意味では、吊るしておくだけでも十分効果があるのですが、日々の増加傾向などをモニタリングしようとすると、粘着シートで吸着した害虫の数を定量化して、日々の変化をトレースできるようにする必要があります。そうすることで、害虫増加の早期発見と迅速な対応が可能になります。
開発の構想
●システムの全体構成
粘着シートを使った害虫モニタリングの課題を解決するために、図1に示すようなシステムを考えました。カメラを搭載したモニタリング装置で粘着シートの状況を撮影し、画像認識で害虫がどの程度付着しているかを測定して結果をサーバへ送信します。サーバでは、モニタリング装置から送られてきたデータを時系列グラフにしてユーザへ提示します。本システムにおける要点は、次の3点です。
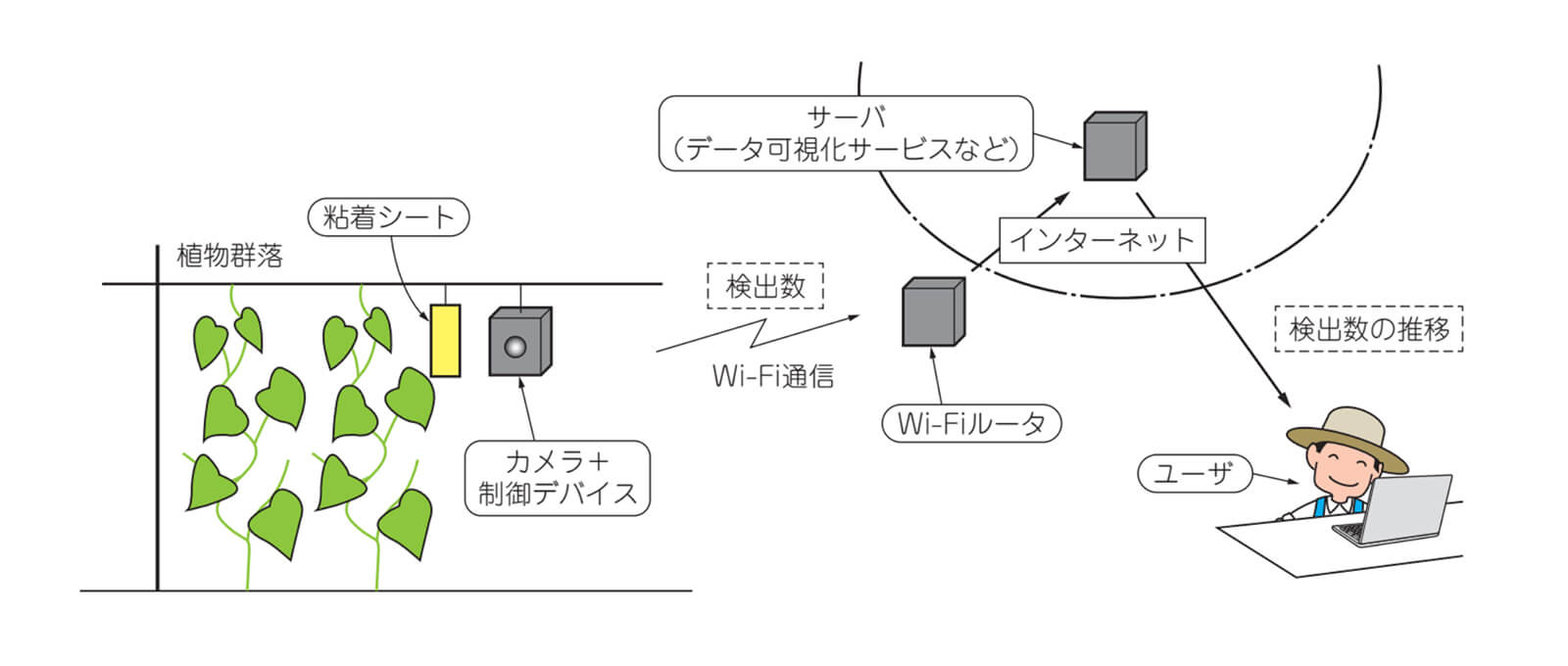
- 1、画像認識技術を利用した害虫の数の定量化
- 2、定期的な測定とサーバへの送信
- 3、測定データの可視化
これにより、日々の害虫増加の傾向をグラフで可視化できるようになり、害虫の増加を早期に把握できます。
●要点1…画像認識を用いた害虫の数の定量化
画像認識技術を用いることで解決できそうです。画像内に写っている物体を認識する技術には、物体検出、画像異常検知、インスタンス・セグメンテーション(個別物体領域分割)などが挙げられます(表1)。
| 技術名 | モデルの出力形式 | 学習データ収集の容易性 | ラベル付けの容易性 | 重なり部分の検出性 | 害虫の種類による分類 | 定量化の方法 | 代表的な手法 |
|---|---|---|---|---|---|---|---|
| 物体検出 | BBox | × | △ | × | ◎ | 検出したBBoxの数を数える | YOLO |
| 画像異常検知 | 異常スコア・マップ | ◎ | ◎ | 〇 | × | 害虫=異常として,異常が占める面積割合を算出する | PaDiM,PatchCore |
| 個別物体領域分割 | 領域マスク画像 | × | × | 〇 | ◎ | マスクの数を数える,または,マスクの領域が占める面積割合を算出する | Mask R-CNN,SAM |
▶物体検出を使った定量化
検出した害虫クラスのバウンディング・ボックス(BBox)を数えることで実現可能です。物体検出では、検出対象のクラス分類もできるため、害虫の種類ごとにカウントできます。しかし、害虫クラスごとに大量の画像データを集める必要があり、データ収集の容易性に難があります。また、物体検出では後処理として、重複するBBoxを集約するためのNon-MaximumSuppression(NMS)が適用されるため、害虫が密集している部位などは1つのBBoxにまとめられてしまう可能性があります。
▶個別物体領域分割を使った定量化
検出した領域マスク画像を数えることで実現できそうです。個別物体領域分割では、物体検出と同じように害虫の種類ごとにカウント可能なことや密集した物体でも個別に認識可能です。しかし、データ収集の容易性やセグメンテーションのラベル付けに労力がかかります。
▶画像異常検知を使った定量化
害虫が写っている領域を異常部位と考え、害虫の領域が占める面積の割合を算出することで実現できそうです。画像異常検知を用いることの最大のメリットは、データ収集において正常データ、つまり、使用前の粘着シートの画像を集めるだけで異常検知モデルを学習することができる点です。
今回のように、害虫が発生した際のデータを集めるのが困難な場合などは有効な選択肢となります。一方、害虫の種類の分類はできません。今回は種類の分類までは不要とし、画像異常検知技術を使って害虫の数を定量化することにしました。
●要点2…定期的な測定とサーバへの送信
本システムでは,モニタリング装置を用いて画像を取得し、画像認識モデルを使って害虫の付着状況を認識した上で、認識結果をインターネットを介してサーバへ送信する必要があります。小さな虫を認識するためには高解像度なカメラ・デバイスが必要になります。また、画像認識モデルを実行するためには、ある程度の計算リソースが必要で、さらに無線通信にも対応(技適取得済み)していなければなりません。
こうした要件や入手性も踏まえると、ラズベリー・パイ3 〜 5 Model B、またはJetsonシリーズ(エヌビディア)などのシングル・ボード・コンピュータにWi-Fiドングルを組み合わせる構成が適切だと考えられます。今回はラズベリー・パイ5 Model Bとカメラ・モジュールV3(広角タイプ)を使用しました。ラズベリー・パイでは、cronやsystemdを使うことで、定期処理を簡単に実装できます。今回は、毎日午前9時に測定を行いデータを送信するよう設定しました。
一方で、今回は採用していませんが、画像認識をサーバ側で実行する構成も考えられます。サーバ側で推論を行うことで、より豊富な計算リソースを利用できますが、容量の大きい画像データを定期的に送信する必要があるため、通信量や通信料が増加してしまいます。
●要点3…測定データの可視化
測定データの可視化には、ローカルで可視化サーバを立てる方法や、クラウド上にサーバを立てる方法、またはクラウド上のデータ可視化サービスを利用する方法があります。データの可視化を実現するためのシンプルな構成としては、測定デバイスから送信されたデータを蓄積するデータベースと、ブラウザ上で可視化を行うWebサーバが必要になります。ローカルで可視化サーバを構築する場合は、データベースと簡単なグラフUI機能が備わっているInfluxDBの利用が便利です。クラウドを使用する場合は、近年さまざまなIoT向けデータ可視化サービスが提供されています。今回はその中でも、分かりやすく簡単に始められるAmbient(※注1)というデータ可視化サービスを利用することにしました。
※注1/IoTデータ可視化サービスAmbient.https://ambidata.io/
ハードウェア…ラズベリー・パイとカメラ・モジュール
●温室ハウスでも使えるように防水仕様にする
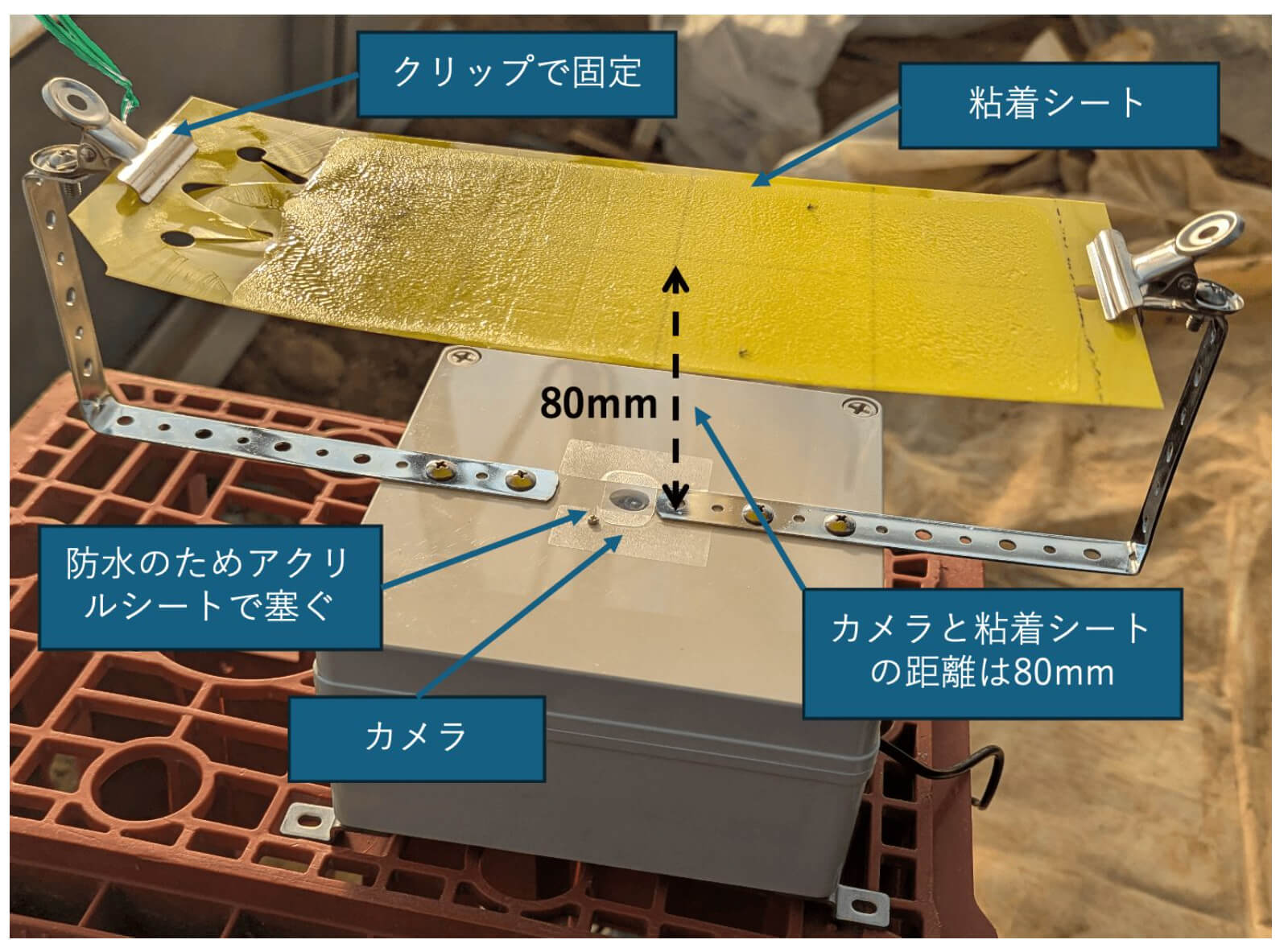
温室ハウスに設置するモニタリング装置を写真2に、製作に使用した部品一覧を表2に示します。温室ハウス内で使用するためには、灌水作業などで水がかかっても問題がないように、防水対策を検討する必要があります。今回製作したモニタリング装置では、ラズベリー・パイとカメラ・デバイスを防水ケース内に配置し、防水ケースのふたにカメラ・レンズがちょうどのぞく程度の直径10mm穴を開けます。レンズ穴は、外側から薄く透明なアクリル・シートで塞ぎ、カメラ基板の防水対策を行います。
| 部品名 | メーカ/販売元 | 型 名 | 個 数 | 備 考 |
|---|---|---|---|---|
| ラズベリー・パイ5 8GB | ラズベリーパイ財団 | SC1112 | 1 | – |
| ラズベリー・パイ5用アクティブ・クーラ | ラズベリーパイ財団 | SC1148 | 1 | – |
| USB Type-C ACアダプタ 5.1V/3.0V | スイッチサイエンス | SSCI-056830 | 1 | ラズベリー・パイ4用を流用 ※ラズベリー・パイ5では5V/5A推奨 |
| ラズベリー・パイ・カメラ・モジュールV3(広角) | ラズベリーパイ財団 | SC0874 | 1 | – |
| ラズベリー・パイ5 FPCカメラ・ケーブル(200mm) | ラズベリーパイ財団 | SC1128 | 1 | – |
| プルボックス防水型 BCASシリーズ | タカチ電機工業 | BCAS151507G | 1 | – |
| プラスチック取り付けベース BMP-Pシリーズ | タカチ電機工業 | BMP1525P | 1 | – |
| タッピング・スペーサ TPSシリーズ | タカチ電機工業 | TPSj-M2.6-10 | 1 | 1袋4個入り |
| コード差込口 | アトッムリビンテック | – | 1 | – |
| ステンレス曲板 500mm | – | – | 1 | 加工して粘着シート固定用ステーとして利用 |
| クリップ | – | – | 2 | – |
| トラスタッピングねじ M4 8mm | – | – | 4 | ステー固定用 |
| トラスねじ M4 10mm | – | – | 2 | クリップ固定用 |
| なべ小ねじ M2 20mm | – | – | 2 | カメラ基板固定用 |
●オートフォーカス付きカメラ・モジュール
カメラ・デバイスは、ラズベリー・パイのカメラ・モジュールV3の広角タイプを使用しました。主な仕様を表3に示します。カメラ・モジュールV3は、標準タイプと広角タイプがありますが、広角タイプの方が最短撮影距離が約5cmとより短いため、今回のようにカメラの近くに配置した被写体にピントを合わせて撮影する場合は、広角タイプの方が適しています。
また、カメラ・モジュールV3には、オートフォーカス機能が搭載されています。写真3に示すように、オート・フォーカス機構によってレンズの黒い部分が動くため、ケースの加工や固定を行う際はレンズの動きを妨げないよう注意が必要です。

| 広 角 | 標 準 | |
|---|---|---|
| イメージセンサ | SONY IMX708 12MP | SONY IMX708 12MP |
| センサ解像度 | 4608×2592ピクセル | 4608×2592ピクセル |
| 被写界深度 | 約5cm~∞ | 約10cm~∞ |
| 焦点距離 | 2.75mm | 4.74mm |
| FoV | 横102°,縦67° | 横66°,縦41° |
| F値 | 2.2 | 1.8 |
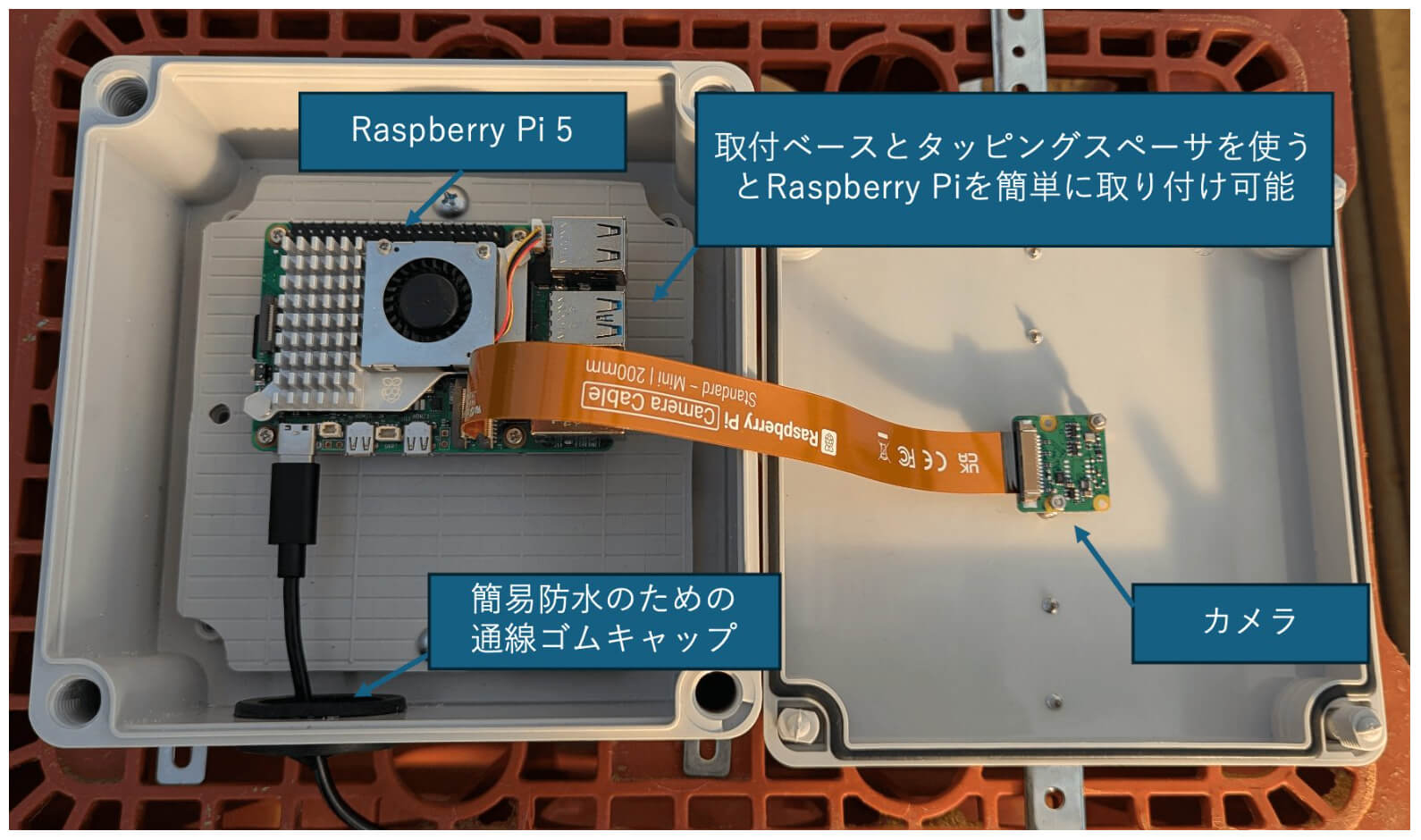
●ちょっとした工夫で製作が楽になる
ラズベリー・パイをケースに固定する際は、プラスチック製の取り付けベースが便利です。取り付けベースにタッピング・スペーサや熱圧入方式のインサート・ナットなどを使用し、M2.6のねじ穴を作った上でラズベリー・パイを固定します。カメラから80mm離れた位置に粘着シートを設置できるよう、ステンレス曲板を加工して取り付けステーを作り、ケースのふたにタッピング・ネジを使って固定します。取り付けステーの先端にはクリップをねじ止めし、上下で粘着シートを挟んで固定できるようにします。
連載では引き続き農業向けAIアプリを開発していきます。
また、2025年7月17日(木)には文京区千石にて、本企画の著者である小池さんによるセミナを開催予定。「実習・ラズパイで作るエッジAIカメラ装置― 農業現場の課題をAIで解決! 推論エンジンailia SDKを活用」。ぜひご参加ください。
小池 誠 氏
キュウリ農家、博士(情報学。大学卒業後、自動車部品メーカーにてソフトウェア・エンジニアとして勤務・退職後、2015年から農業に従事。現在は農業を行う傍ら、大学においてスマート農業に関する研究に取り組んでいる。

コンピューター・サイエンス&テクノロジ専門誌『Interface』
CQ出版社が発行するコンピュータ技術専門の月刊誌です。1974年の創刊以来、組み込みシステム、ソフトウェア、AI、IoTなど、時代とともに進化するコンピュータ技術を幅広く紹介しています。理論だけでなく、実践的なプログラミングや実機製作の記事も豊富で、エンジニアから学生まで、コンピュータ技術を深く学びたい読者に支持されています。
https://interface.cqpub.co.jp/
SHARE THIS ARTICLE